PRONOBIS at RAAD 2026
We are proud to announce that two papers from our project have been accepted for presentation at RAAD 2026 - the 34th International Conference on Robotics in Alpe-Adria-Danube Region. RAAD is a well-established scientific conference that brings together researchers and industry experts from across Europe to present advances in robotics, automation, intelligent systems, and their real-world applications. Participation in RAAD highlights the growing international recognition of our work in medical robotics and image-guided intervention technologies.
The first accepted paper, Visual Servoing Based Patient Movement Compensation for Prostate Biopsy Procedure, presents a robotic solution for one of the key challenges in ultrasound-guided prostate biopsy: involuntary patient motion during the intervention. Our researchers developed a dual-robot experimental system in which one robotic arm performs ultrasound scanning while another simulates patient movement using a prostate phantom. The proposed method combines visual servoing, force control, and real-time image segmentation to maintain accurate probe positioning and stable prostate reconstruction throughout the procedure. Experimental validation demonstrated highly accurate compensation performance, with reconstruction agreement above 99% and sub-millimeter positioning error in most test scenarios.
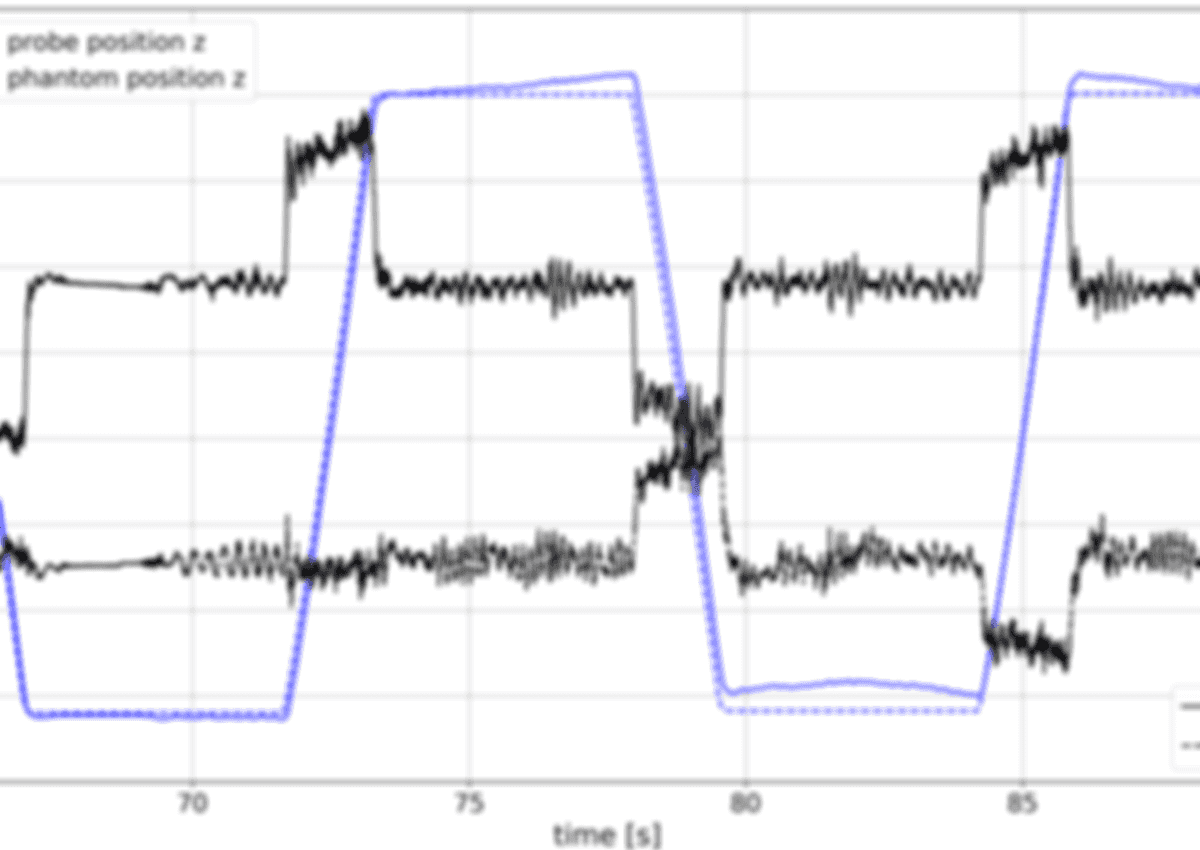
Graph showing data acquired during vertical motion of the phantom.
The second accepted paper, Optimization of Robot Base Placement for Prostate Biopsy Planning, focuses on improving robotic setup before the procedure even begins. In robot-assisted interventions, the physical placement of the robot strongly influences reachability, dexterity, and safety. This study compares several optimization strategies, including reachability analysis, manipulability mapping, and genetic algorithms, to determine the most effective robot base position relative to the patient. Results showed up to a 72% increase in reachable target configurations, demonstrating the importance of systematic preoperative planning for reliable robotic performance.
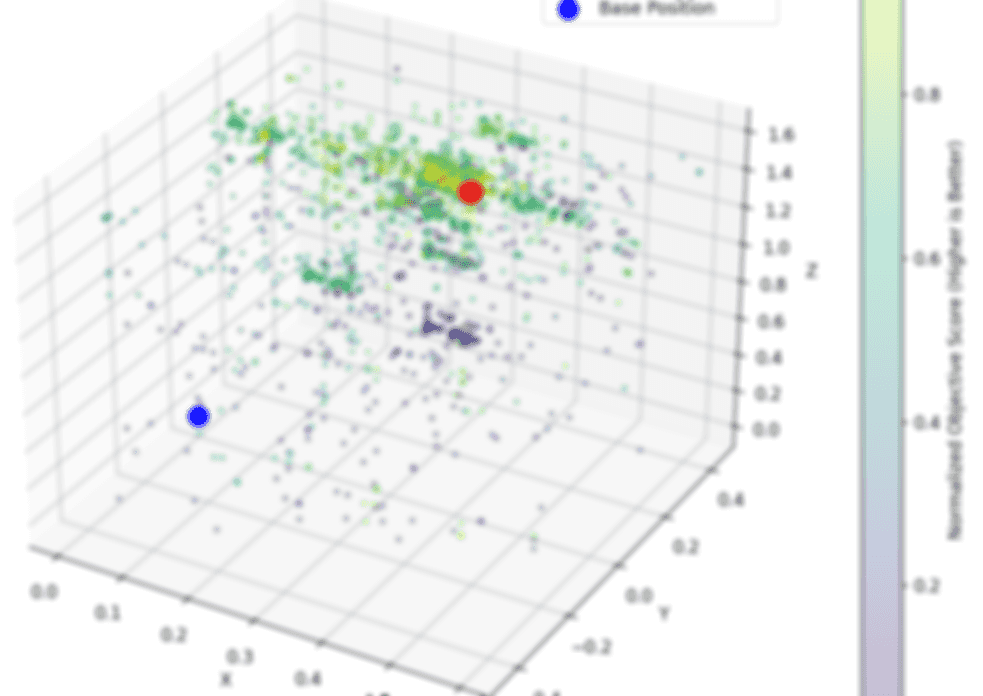
Optimization of Robot Base Placement - results.
Together, these two accepted contributions address both intraoperative and preoperative challenges in robot-assisted prostate biopsy procedures. One paper improves motion robustness during scanning, while the other enhances robot positioning and workspace efficiency. Their acceptance at RAAD 2026 reflects the multidisciplinary strength of our project, combining robotics, medical imaging, optimization, and clinical collaboration to develop next-generation solutions for prostate cancer diagnosis and treatment.
We look forward to presenting our results at RAAD 2026, exchanging ideas with the international robotics community, and building new collaborations that can accelerate the future of medical robotic systems.
